Learning to Prune Branches in Modern Tree-Fruit Orchards
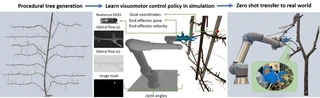 Graphical Abstract: Our pipeline for pruning branch detection in modern orchards.
Graphical Abstract: Our pipeline for pruning branch detection in modern orchards.Watch the Demo
See our robotic pruning system in action:
Abstract Details
Dormant tree pruning is labor intensive but essential to maintaining modern highly-productive fruit orchards. In this work we present a closed-loop visuomotor controller for robotic pruning. The controller guides the cutter through a cluttered tree environment to reach a specified cut point and ensures the cutters are perpendicular to the branch. We train the controller using a novel orchard simulation that captures the geometric distribution of branches in a target apple orchard configuration. Unlike traditional methods requiring full 3D reconstruction, our controller uses just optical flow images from a wrist-mounted camera. We deploy our learned policy in simulation and the real-world for an example V-Trellis envy tree with zero-shot transfer, achieving a ~30% success rate - approximately half the performance of an oracle planner.
